Dual Fisheye Camera Calibration
2019/02 - 2019/06
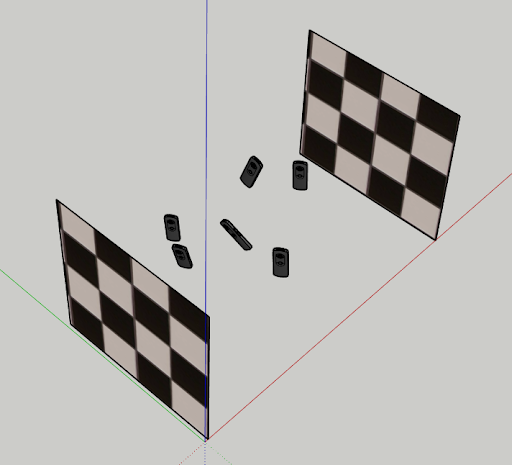 We developed a calibration algorithm for a dual fisheye camera (Ricoh Theta V) and chessboard corner finding tool for highly distorted images.
We developed a calibration algorithm for a dual fisheye camera (Ricoh Theta V) and chessboard corner finding tool for highly distorted images.
The project is done as a semester project at TOPO laboratory. The purpose of the project was to develop a calibration algorithm for a dual fisheye camera with lenses oriented in the opposite direction. The intrinsic parameters of both cameras, as well as a rotation between the cameras, are determined using nonlinear least-squares optimisation. Multiple approaches are evaluated to maximize accuracy and minimize correlation between determined parameters. In addition, a simple semiautomatic chessboard corner finding tool is developed to obtain data set from highly distorted images.
Keywords: Camera Calibration, Dual Fisheye, Bundle Adjustment, Optimisation, OpenCV
Report
Code
Website