Obstacle Avoidance with Thymio and ROS
2019/05
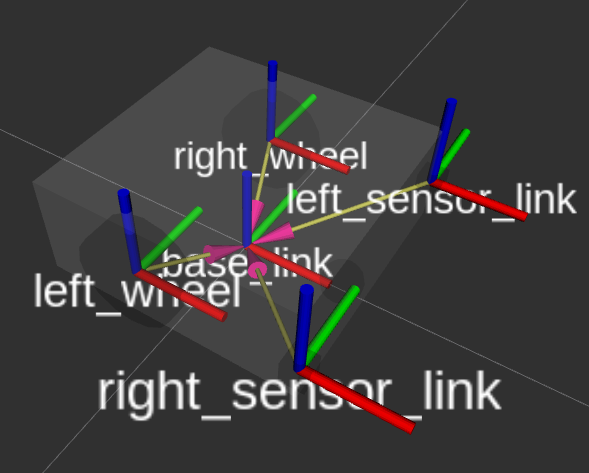 We modeled a Thymio robot in URDF, implemented velocity control and obtacle avoidance in scope of ROS.
We modeled a Thymio robot in URDF, implemented velocity control and obtacle avoidance in scope of ROS.
This is a small project done in scope of Robotics practicals course. It was the first time I used the ROS to control a robot in Gazebo simulation. The project included robot URDF modeling, PID regulation for velocity control and implementation of an arbitrary algorithm for obstacle avoidance.
Keywords: ROS, Robotics, Obstacle Avoidance, URDF, Control
Report
Code