ROS2 Programming Interface for the E-puck2 Robot
2020/02 - 2020/08Developed ROS2 driver for e-puck2 physical robot, improved Webots support for ROS2 and created plenty of examples.
Multi-robot Navigation in Cluttered Environments
2019/10 - 2019/12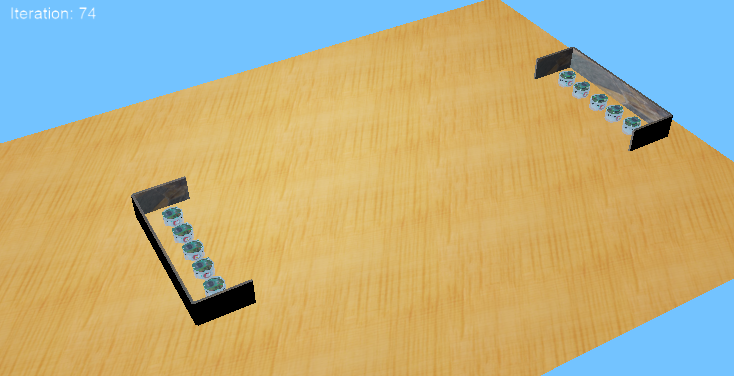
We implemented potential field algorithm for obstacle avoidance, flocking, and optimized the robot’s behaviour with PSO.
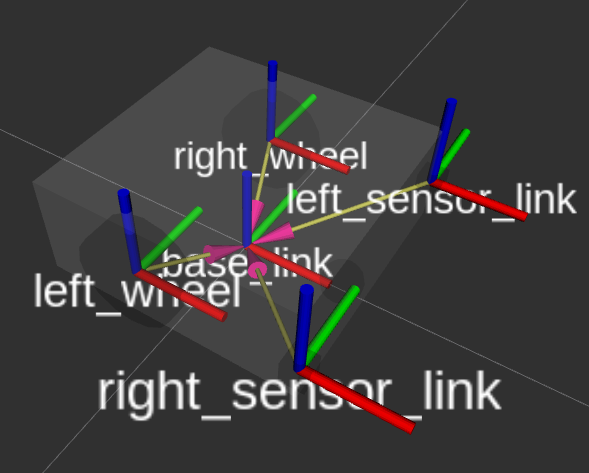
We modeled a Thymio robot in URDF, implemented velocity control and obtacle avoidance in scope of ROS.

We trained the TensorFlow model to detect feature points on a pedestrian and used it to follow the pedestrian.
Dual Fisheye Camera Calibration
2019/02 - 2019/06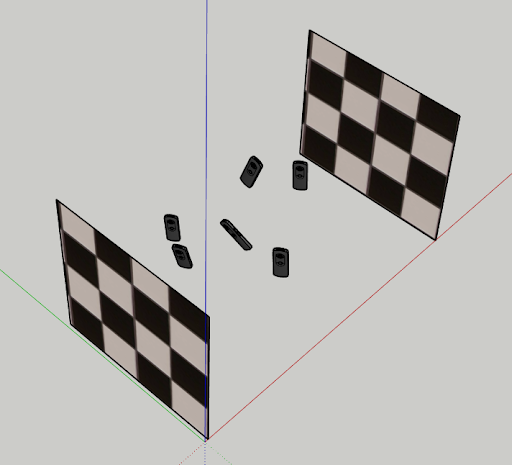
We developed a calibration algorithm for a dual fisheye camera (Ricoh Theta V) and chessboard corner finding tool for highly distorted images.
Underwater Acoustic Communication
2018/09 - 2019/01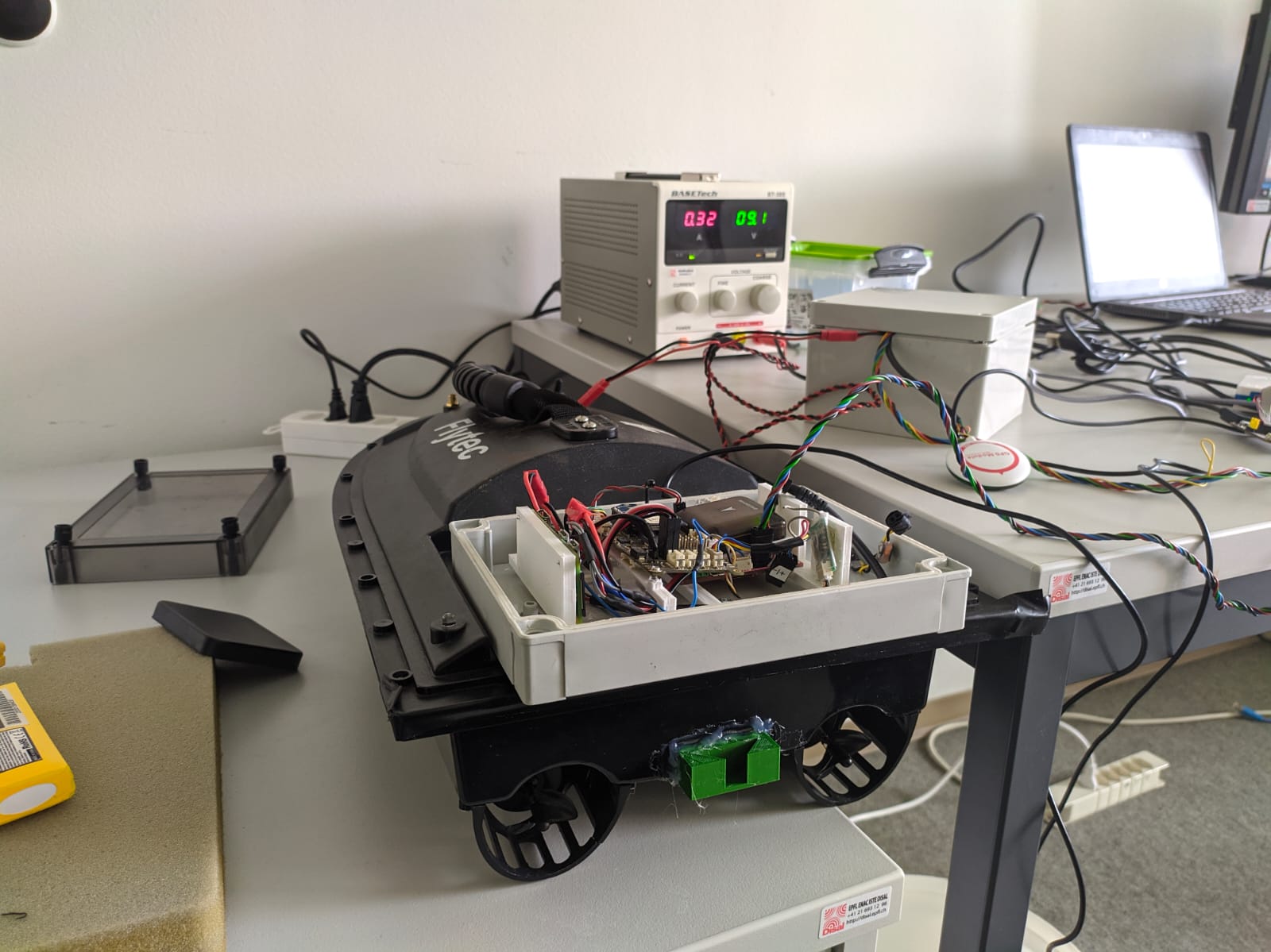
We implemented frequency-shift keying (FSK) modulation on a microcontroller to allow underwater communication for underwater unmanned vehicles.
Walking Controller for a Three-link 2D Biped
2018/09 - 2018/12
We modeled and visualized the 3-link biped, and designed a walking controller.
SpesRobo, Robotic Prototyping Platform
2015/05 - 2016/04
We created a robotic prototyping platform to allow users to create, share and distribute interactive applications.
Demetra21, Smart Greenhouse
2012/09 - 2013/08
A side project, during high school, that demonstrates a potential benefits of connected devices and web technologies within agriculture.
SpesDriver, Online Learning Platform
2012/08 - present
SpesDriver, mobile and web application, is the online learning platform for drivers.